


-
Empezando
¡Dile hola a Quarky Robot!4 Temas -
RobóticaDiversión con robots5 Temas
-
Robot seguimidor de línea5 Temas
-
LLEVANDO EL APRENDIZAJE AL MUNDO REALQuarky como robot de entrega de IA5 Temas
-
Haga su propio recolector de residuos4 Temas
-
Quarky como robot de asistencia de IA4 Temas
-
Haga su propio automóvil autónomo4 Temas
-
Mascota robot4 Temas
ACTIVIDAD: Robot de seguimiento de línea simplificado

Jose Delgado 25/04/2024
Robot de seguimiento de línea simplificado: descripción general
Estarás de acuerdo con nosotros cuando decimos que hacer el guión para nuestro robot de seguimiento de línea fue tedioso; agregando taaaaaaaaaaaan cantidad de bloques, revisando cada motor individualmente cada vez, y todo eso.
¡Pero tenemos buenas noticias! PictoBlox tiene unos bloques especiales dedicados a hacer un robot de seguimiento de línea que reemplazará TODOS los bloques que usamos en el script anterior. ¡Echemos un vistazo a ellos!
¡Codifiquemos!
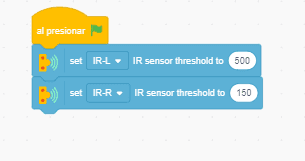
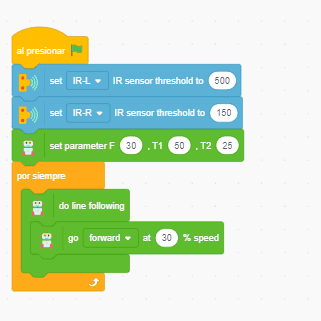
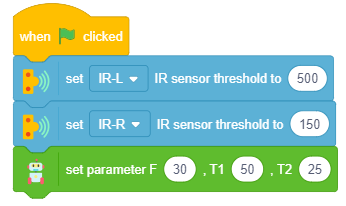
- Agregue un bloque de bandera verde en el área de secuencias de comandos y dos bloques establecidos () del umbral del sensor de infrarrojos en () y establezca el umbral del sensor de infrarrojos izquierdo y derecho.
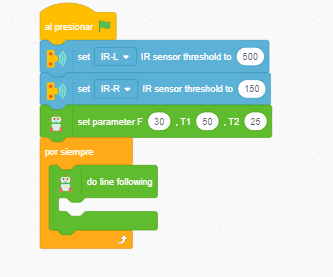
- Vaya a la paleta Robot y arrastre y suelte un bloque de parámetros establecidos F (), T1 (), T2 () .Establezca los parámetros que ha finalizado en el último tema.

- Agregue un bloque indefinido debajo del bloque de parámetros establecido F (), T1 (), T2 () .
- Ahora, desde la paleta de Robot , agregue una línea do siguiente bloque dentro del bloque forever. Este bloque se encargará de TODAS las condiciones de línea siguientes que tuvimos que comprobar individualmente en nuestro script anterior.
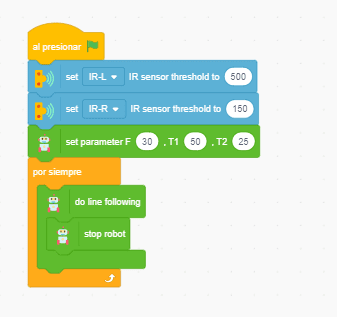
- A continuación, agregue un bloque de robot de parada dentro del siguiente bloque de línea do .
¡Disfruta de VERDAD ahora!
¿Qué pasa en los puestos de control?
Como habrás notado, el robot detecta los puntos de control en el bloque seguidor de línea, podemos hacer lo que queramos en ese punto de control. Como en el código anterior, hicimos que el robot se detuviera en el punto de control.
También puede hacer que el robot avance para que se mueva en la pista sin interrupciones de esta manera:
¡Usaremos este punto de control de muchas formas diferentes en las próximas lecciones!
Asignación
Antes de pasar a la siguiente lección, ¡le espera una pequeña tarea!
Haz un video del proyecto que realizaste en esta actividad y súbelo al sitio web.
Enviar la tarea es imprescindible para recibir el certificado después de completar el curso.
Siga los pasos a continuación para cargar su tarea:
- Primero, debe elegir el archivo de video, luego haga clic en Examinar .
- Seleccione su archivo de video.
- Y haga clic en el botón Cargar .
¡Buena suerte! ?




{kind=link}